Robots have always been fascinated by me. Robotics projects are usually quite complex, as design and mechanics, electronics, sensor technology and programming in high quality are required and a workshop with the corresponding machines such as CNC milling and 3D printers is necessary.
Early on in my household I had a vacuum robot, a robot dog and, to this day, a telepresence robot for remote monitoring. At the beginning of the 90s I even showed my then robot “Maxx Steele” in my mother’s preschool to an interested group of children. Perhaps these children – now grown up – now have their own robots.

In the years I worked as a robot developer and dealer, I got to know and worked with a number of robots.
Here is a KHR-1 from Kondo (from which I later developed the KHR-1 Steelpump):

Here with the YDNA prototype:

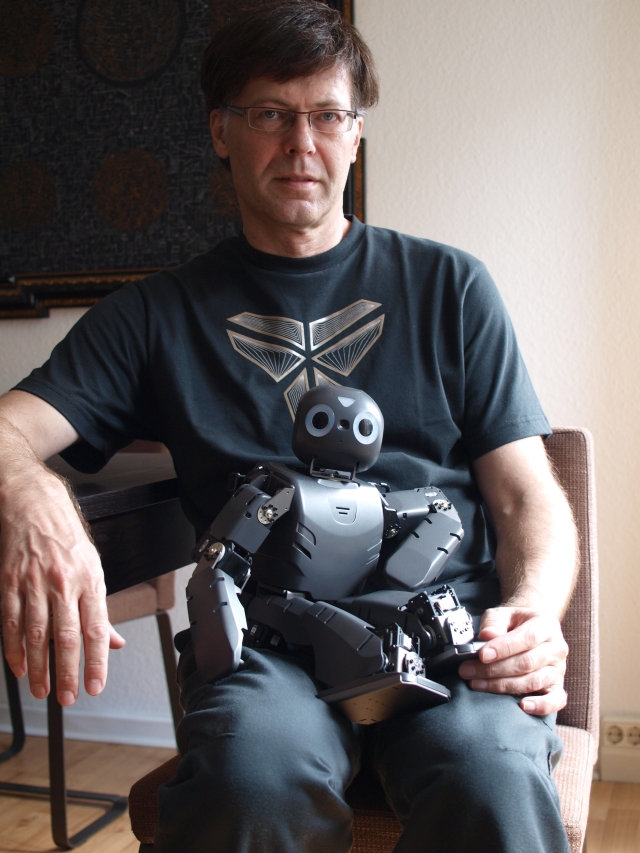
Here, for example, the DarWIN-OP from Robotis (2011):

here a DrRobot Jaguar Lite Outdoor tracked vehicle (2010):

here a Kondo KHR-2HV (2009)

This is an image of one of my own developed robot called YDNA (speak: Why DNA?)

Here the H20 is a humanoid robot with semi-autonomous navigation and three cameras (Photo: Oliver S. Scholten)

Here are some projects that have been realized so far:
1) Increase the force of a Kondo KHR-1 by approx. 250%
2) Design and programming of a two-legged stalker with obstacle detection
3) Self-construction of a two-legged aluminium with aluminium parts from our own production: YDNA1
4) Self-construction of a two-legged with aluminium parts by Lynxmotion: YDNA2
6) TeleRobot, a camera robot vehicle controlled over the Internet (ongoing)