
EasyBot is a kinetic robot installation.

EasyBot is a work from my series of “emotional robots”.
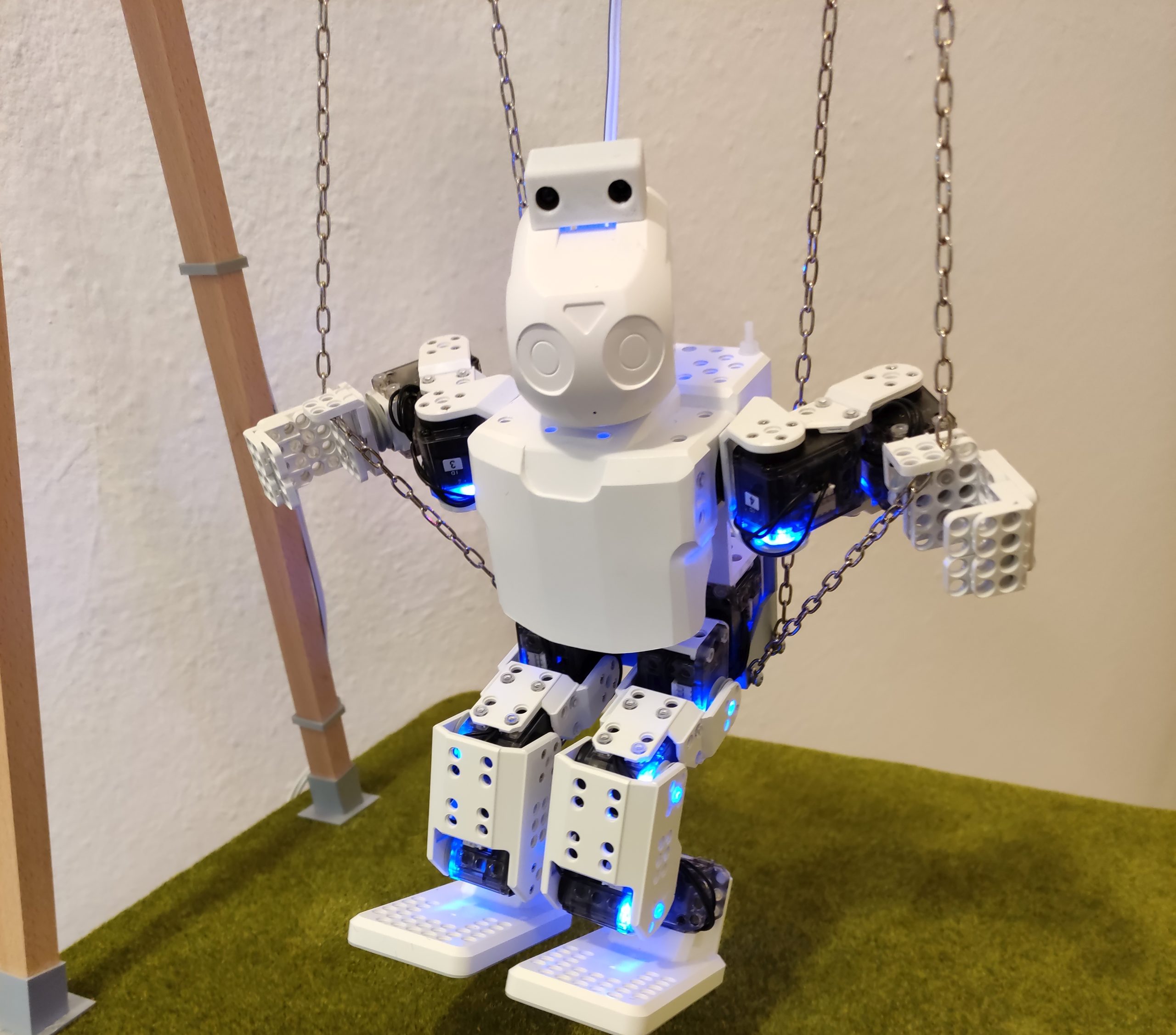
Formally, the robot stands on a lawn under a swing and, upon meeting a visitor, begins to swing for a while, quite unconstrained and lively. Having come to rest, it stands under the swing and waits for the next visitor.
The robot does something it was not created for, it has fun. Moreover, he does something “senseless”, he wastes energy and time. All this happens in a milieu for which he was not created, a swing, sand, a meadow. The senselessness here gives its own meaning and questions the purpose-bound destiny – not only in robots. The kinetic robot installation “EasyBot” addresses this.

Formally, I chose a “humanoid” robot from 2014 for this work, which is now getting on in years and increasingly difficult to program, although there are still relatively many parts and software tools for it. After once again nothing works as it once should, I reprogrammed it from scratch on the old electronic components to keep it authentic. For me it was important that he rocks, not hanging by his arms as a performer, but sitting, like a playing, impetuous child. Surprisingly, according to my research, there are only few experiments with (non-artistic) rocking robots worldwide, maybe because it is so “pointless”. They have not yet appeared in art. Take it easy.
EasyBot (2021)
mixed media, robot, table, swing, electronics, 3D printing
Weight: 20 kg
Dimensions: (height variable) 150cm(H minimal) x 69cm(W) x 48cm(D)
Edition: 2+1ea, each is unique
Exhibited:
33 guests, HOTO Berlin, 05.-08.08.2021
Olaf Schirm – Main Works, Guelman und Unbekannt Gallery, Berlin, 2023